 Ajutor
Ajutor



Am observat un lucru in modul STABILITY, MPNG si nu stiu daca e un comportament normal.
Sa zicem ca fac un zbor rapid in fata, dupa care las stick-ul liber (centrat).. quadul revine la orizontala dar inainte de asta pare ca vrea sa compenseze inertia. In alte cuvinte, se inclina in directia opusa miscarii dupa care revine la orizontala. Inclinatia este cu atat mai mare cu cat viteza este mai mare.
E normal? La mwii nu e asa. Pur si simplu revine la orizontala continuand miscarea data de inertie.
ALL IN ONE PRO Flight Controller v1.0 Multiwii sau MegaPirate
#242
 renatoa
renatoa 
- Sky Sapiens
-

- Grup: Members
- Postari: 19176
- Inregistrat: 28-April 05
- Gender:Male
Postat 29 October 2012 - 12:34 PM
Probabil sunt abordari diferite ale programatorilor, depinde de viziunea lor despre "normal"
Daca stick la centru inseamna stai pe loc, atunci normalul ar fi sa franeze, nu doar sa revina la orizontala...
Si la mine face la fel, deci nu ai de ce sa iti faci griji ca ar avea ceva al tau.
Daca stick la centru inseamna stai pe loc, atunci normalul ar fi sa franeze, nu doar sa revina la orizontala...
Si la mine face la fel, deci nu ai de ce sa iti faci griji ca ar avea ceva al tau.
... cu picioarele pe pamant ...
#243
icsss

- MEGA Membru
-
- Grup: Members
- Postari: 2085
- Inregistrat: 16-May 10
- Gender:Male
- Location:Iasi
- Interests:Aeromodelism
Postat 29 October 2012 - 01:29 PM
 renatoa, la 29 October 2012 - 12:34 PM, a spus:
renatoa, la 29 October 2012 - 12:34 PM, a spus:
Probabil sunt abordari diferite ale programatorilor, depinde de viziunea lor despre "normal"
Daca stick la centru inseamna stai pe loc, atunci normalul ar fi sa franeze, nu doar sa revina la orizontala...
Si la mine face la fel, deci nu ai de ce sa iti faci griji ca ar avea ceva al tau.
Daca stick la centru inseamna stai pe loc, atunci normalul ar fi sa franeze, nu doar sa revina la orizontala...
Si la mine face la fel, deci nu ai de ce sa iti faci griji ca ar avea ceva al tau.
M-am linistit :blush:
Revin la vechea me problema legata de frame si am 2 intrebari:
Am tot adaugat greutate utila pe quad (FPV, UBEC, etc) adica putin peste 1300g, RTF. Quadul a devenit instabil in STABILITY, mai ales pe vant. Am incercat sa umblu la PID-uri dar fara succes. Distanta intre motoare este de 44 cm si ma gandesc ca asta ar putea sa-l afecteze. (1) Exista un optim, o forumala, ceva?
Am inceput un frame, quad X, de ~57 cm intre motoare, pe care vreau sa-l incarc cu aprox 1600g (gimbal + foto compact + OSD), adica 400g/motor (2830, 1000kv, 10x45). (2) Fezabil sau trec pe hexa? Problema e ca n-am pack-uri de hexa. :)
#244
renatoa
- Sky Sapiens
-
- Grup: Members
- Postari: 19176
- Inregistrat: 28-April 05
- Gender:Male
Postat 29 October 2012 - 02:18 PM
Vezi socotelile de le pusei azi in topicul cadrului RM450.
1600 fezabil, dar cu elici de 11, iar la 57 cm o sa poti pune si 12.
Numai ca, cu cat creste elicea, cu atat e mai sensibil la vant...
Mi se pare ciudata chestia cu instabilitatea pe motiv ca l-ai ingreunat... mie nu mi-a zburat niciodata asa bine ca atunci cand am avut camera de 275 grame pe el, cred ca total aveam 1500...
1600 fezabil, dar cu elici de 11, iar la 57 cm o sa poti pune si 12.
Numai ca, cu cat creste elicea, cu atat e mai sensibil la vant...
Mi se pare ciudata chestia cu instabilitatea pe motiv ca l-ai ingreunat... mie nu mi-a zburat niciodata asa bine ca atunci cand am avut camera de 275 grame pe el, cred ca total aveam 1500...
... cu picioarele pe pamant ...
#245
icsss
- MEGA Membru
-
- Grup: Members
- Postari: 2085
- Inregistrat: 16-May 10
- Gender:Male
- Location:Iasi
- Interests:Aeromodelism
Postat 29 October 2012 - 03:25 PM
renatoa, la 29 October 2012 - 02:18 PM, a spus:
Mi se pare ciudata chestia cu instabilitatea pe motiv ca l-ai ingreunat... mie nu mi-a zburat niciodata asa bine ca atunci cand am avut camera de 275 grame pe el, cred ca total aveam 1500...
Am omis sa spun ca CG-ul era deplasat din centru cadrului, posibil si asta sa-l afecteze..
#246
icsss
- MEGA Membru
-
- Grup: Members
- Postari: 2085
- Inregistrat: 16-May 10
- Gender:Male
- Location:Iasi
- Interests:Aeromodelism
Postat 31 October 2012 - 01:00 PM
M-am hotarat sa pun SimonK pe cele 4 Mystery 30A dar nu inteleg o chestie..
atmega 8-based brushless ESC + enable Bootloader (8kB flash)
sau
atmega 8-based brushless ESC (8kB flash)
Nu inteleg partea cu "+ enable Bootloader". Ce aleg? Cu sau fara "+ enable Bootloader"?
Mystery 30A
USBasp AVR Programming Device for ATMEL proccessors
kkflashtool
PS: Firmware-ul este BS-FET?
atmega 8-based brushless ESC + enable Bootloader (8kB flash)
sau
atmega 8-based brushless ESC (8kB flash)
Nu inteleg partea cu "+ enable Bootloader". Ce aleg? Cu sau fara "+ enable Bootloader"?
Mystery 30A
USBasp AVR Programming Device for ATMEL proccessors
kkflashtool
PS: Firmware-ul este BS-FET?
#247
renatoa
- Sky Sapiens
-
- Grup: Members
- Postari: 19176
- Inregistrat: 28-April 05
- Gender:Male
Postat 31 October 2012 - 01:33 PM
Depinde, exista variante si cu N-Fet. Trebuie despielitat unul pentru identificare.
Daca sunt cele pentium de ultima generatie, sunt cu proc silabs, nici nu le poti flashui.
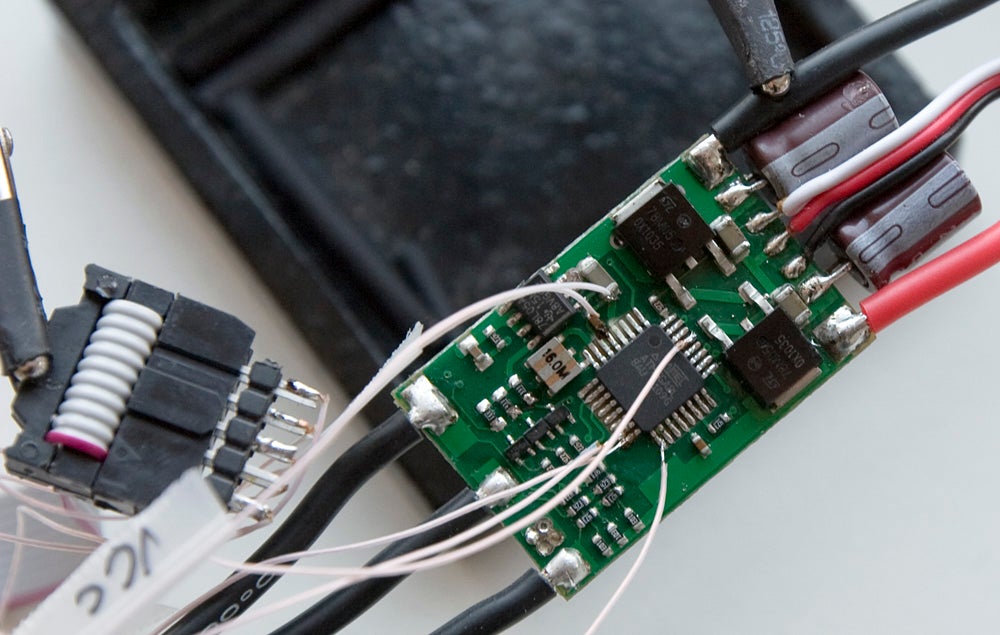
Dar, indiferent de variante, sunt fara pad-uri de reflash, asa ca te asteapta un chin... Cam ca astea:
Eu le-as "marita" asa cum sunt si as lua niste F-20/30 cinstite...
Daca sunt cele pentium de ultima generatie, sunt cu proc silabs, nici nu le poti flashui.
Dar, indiferent de variante, sunt fara pad-uri de reflash, asa ca te asteapta un chin... Cam ca astea:
Eu le-as "marita" asa cum sunt si as lua niste F-20/30 cinstite...
Fisiere atasate
-
 blueseries30a_isp.jpg (186.3K)
blueseries30a_isp.jpg (186.3K)
Number of downloads: 34
Aceasta postare a fost editata de renatoa: 31 October 2012 - 01:34 PM
... cu picioarele pe pamant ...
#248
icsss
- MEGA Membru
-
- Grup: Members
- Postari: 2085
- Inregistrat: 16-May 10
- Gender:Male
- Location:Iasi
- Interests:Aeromodelism
Postat 31 October 2012 - 03:18 PM
renatoa, la 31 October 2012 - 01:33 PM, a spus:
Depinde, exista variante si cu N-Fet. Trebuie despielitat unul pentru identificare.
Daca sunt cele pentium de ultima generatie, sunt cu proc silabs, nici nu le poti flashui.
Dar, indiferent de variante, sunt fara pad-uri de reflash, asa ca te asteapta un chin... Cam ca astea:
Eu le-as "marita" asa cum sunt si as lua niste F-20/30 cinstite...
Daca sunt cele pentium de ultima generatie, sunt cu proc silabs, nici nu le poti flashui.
Dar, indiferent de variante, sunt fara pad-uri de reflash, asa ca te asteapta un chin... Cam ca astea:
Eu le-as "marita" asa cum sunt si as lua niste F-20/30 cinstite...
Imi asum chinul pentru reflash :)
Am gasit pe net ca sunt la fel cu HK 30A Blue Series si alea's cu N-FET si merg flashuite.. dar ce nu inteleg e optiunea "enable Bootloader" din KKMulticopter flash tool.
Aceasta postare a fost editata de icsss: 31 October 2012 - 03:18 PM
#249
icsss
- MEGA Membru
-
- Grup: Members
- Postari: 2085
- Inregistrat: 16-May 10
- Gender:Male
- Location:Iasi
- Interests:Aeromodelism
Postat 31 October 2012 - 03:51 PM
Citeaza
flashed with SimonK with bootloader enabled so you can flash them in the future thought the servo cable with the USB linker from HobbyKing
:) deci nu...
O sa flashuiesc fara optiunea asta.
Aceasta postare a fost editata de icsss: 31 October 2012 - 03:52 PM
#250
icsss
- MEGA Membru
-
- Grup: Members
- Postari: 2085
- Inregistrat: 16-May 10
- Gender:Male
- Location:Iasi
- Interests:Aeromodelism
Postat 31 October 2012 - 05:35 PM
icsss, la 31 October 2012 - 03:51 PM, a spus:
:unsure: deci nu...
O sa flashuiesc fara optiunea asta.
O sa flashuiesc fara optiunea asta.
Rectificare
Am ajuns acasa si m-am uitat atent la esc meu (Mystery 30A) si e la fel cu Hobbyking BlueSeries 30A de aici, adica cel din poza uplodata de tine :)
deci fisierul e bs.hex si nu bs_nfet.hex
Aceasta postare a fost editata de icsss: 31 October 2012 - 05:36 PM
#251
Para
- Senior
-
- Grup: Members
- Postari: 462
- Inregistrat: 20-December 11
- Gender:Male
- Location:Bucuresti, Ghencea
Postat 01 November 2012 - 12:47 AM
Daca le flash-uiesti cu bootloader, n-o sa mai trebuiasca sa stai sa lipesti fire pe MOSI/MISO/SCK/RST daca vrei sa reprogramezi. O poti face direct pe cupla de trei fire spre FC :rofl:
#252
icsss
- MEGA Membru
-
- Grup: Members
- Postari: 2085
- Inregistrat: 16-May 10
- Gender:Male
- Location:Iasi
- Interests:Aeromodelism
Postat 06 November 2012 - 11:30 AM
Incerc sa setez gimbalul in mpng 2.7 dar fara succes, servourile nu se misca.
Servourile sunt conectate pe placa la 44 si 45.
CAM_P_FUNCTION 7
CAM_R_FUNCTION 8
MNT_MODE 2
MNT_STAB_PITCH 1
MNT_STAB_ROLL 1
Aveti alte idei?
Servourile sunt conectate pe placa la 44 si 45.
CAM_P_FUNCTION 7
CAM_R_FUNCTION 8
MNT_MODE 2
MNT_STAB_PITCH 1
MNT_STAB_ROLL 1
Aveti alte idei?
#254
icsss
- MEGA Membru
-
- Grup: Members
- Postari: 2085
- Inregistrat: 16-May 10
- Gender:Male
- Location:Iasi
- Interests:Aeromodelism
Postat 06 November 2012 - 11:47 AM
renatoa, la 06 November 2012 - 11:42 AM, a spus:
Ai setat si CAM_P_ANGLE_MAX, CAM_P_ANGLE_MIN, CAM_R_ANGLE_MAX, CAM_R_ANGLE_MIN ?
Erau setate asa:
CAM_P_ANGLE_MAX 4500
CAM_P_ANGLE_MIN -4500
CAM_R_ANGLE_MAX 4500
CAM_R_ANGLE_MIN -4500
Conteaza ca sunt pe extended power? fara jumper?
Gimbalul functioneaza si cand e dezarmat quadul?
Unde se conteaza Gimbal Control? a14/a15 sau 32/33
Aceasta postare a fost editata de icsss: 06 November 2012 - 11:51 AM
#255
renatoa
- Sky Sapiens
-
- Grup: Members
- Postari: 19176
- Inregistrat: 28-April 05
- Gender:Male
Postat 06 November 2012 - 12:03 PM
Schimba-le la 1000
Cu jumper fara jumper nu am idee la placa asta, la Flyduino ce am eu servo-urile de gimbal au alimentare separata, daca se caleaza vreunul sa nu darame alimentarea la toata placa.
14/15 (la Flyduino) si iesire pe 44/45/46, ultimul camera trigger.
Cu jumper fara jumper nu am idee la placa asta, la Flyduino ce am eu servo-urile de gimbal au alimentare separata, daca se caleaza vreunul sa nu darame alimentarea la toata placa.
14/15 (la Flyduino) si iesire pe 44/45/46, ultimul camera trigger.
... cu picioarele pe pamant ...
#256
icsss
- MEGA Membru
-
- Grup: Members
- Postari: 2085
- Inregistrat: 16-May 10
- Gender:Male
- Location:Iasi
- Interests:Aeromodelism
Postat 06 November 2012 - 12:19 PM
renatoa, la 06 November 2012 - 12:03 PM, a spus:
Schimba-le la 1000
Cu jumper fara jumper nu am idee la placa asta, la Flyduino ce am eu servo-urile de gimbal au alimentare separata, daca se caleaza vreunul sa nu darame alimentarea la toata placa.
14/15 (la Flyduino) si iesire pe 44/45/46, ultimul camera trigger.
Cu jumper fara jumper nu am idee la placa asta, la Flyduino ce am eu servo-urile de gimbal au alimentare separata, daca se caleaza vreunul sa nu darame alimentarea la toata placa.
14/15 (la Flyduino) si iesire pe 44/45/46, ultimul camera trigger.
Le-am schimbat si nimic..
#257
icsss
- MEGA Membru
-
- Grup: Members
- Postari: 2085
- Inregistrat: 16-May 10
- Gender:Male
- Location:Iasi
- Interests:Aeromodelism
Postat 06 November 2012 - 02:31 PM
icsss, la 06 November 2012 - 12:19 PM, a spus:
Le-am schimbat si nimic..
Cum as putea sa alimetez servourile separat?
1. Iau semnalul (S) de pe AIO si +/- de pe un BEC extern?
2. Sau iau [semnal (S) si G] de pe AIO si [+] de la un ESC de pe quad (de la firul rosu care acum e scos)
#258
renatoa
- Sky Sapiens
-
- Grup: Members
- Postari: 19176
- Inregistrat: 28-April 05
- Gender:Male
Postat 06 November 2012 - 03:01 PM
A doua pare cea mai indicata: scoti plusul de la servo-uri, lasi masa si semnalul, si conectezi cu + de la ESC, care acum e scos. In felul asta daca masa de la ESC-ul respectiv se deconecteaza nu vei avea bucle.
De ce e scos plusul, ai verificat si pe placa AIO plusurile sunt in paralel ?
Pe Flyduino numai primul ESC este conectat la placa, restul au pinii de plus in aer.
De ce e scos plusul, ai verificat si pe placa AIO plusurile sunt in paralel ?
Pe Flyduino numai primul ESC este conectat la placa, restul au pinii de plus in aer.
... cu picioarele pe pamant ...
#259
icsss
- MEGA Membru
-
- Grup: Members
- Postari: 2085
- Inregistrat: 16-May 10
- Gender:Male
- Location:Iasi
- Interests:Aeromodelism
Postat 06 November 2012 - 03:11 PM
renatoa, la 06 November 2012 - 03:01 PM, a spus:
De ce e scos plusul, ai verificat si pe placa AIO plusurile sunt in paralel ?
Pe Flyduino numai primul ESC este conectat la placa, restul au pinii de plus in aer.
Pe Flyduino numai primul ESC este conectat la placa, restul au pinii de plus in aer.
Am scos toate plusurie de la ESC-uri si alimentez placa de la un BEC extern prin pinii de Extend Power, cu jumperul galben scos
PS: nu am verificat daca plusurile sunt in paralel
Aceasta postare a fost editata de icsss: 06 November 2012 - 03:14 PM
#260
renatoa
- Sky Sapiens
-
- Grup: Members
- Postari: 19176
- Inregistrat: 28-April 05
- Gender:Male
Postat 06 November 2012 - 03:20 PM
Crezi ca un BEC extern e mai de incredere decat BEC-ul de pe un ESC?
Daca e in comutatie mai si radiaza...
BEC-urile pe ESC-urile de avioane fac probleme din cauza servo-urilor, in regimul lejer de pe un mk sunt la fel de sigure ca un BEC extern.
Iar ESC-urile cat de cat serioase au propriul lor BEC pentru procesor, caderea BEC-ului de servo nu influenteaza controlul motorului, daca mai ai receptie
Daca e in comutatie mai si radiaza...
BEC-urile pe ESC-urile de avioane fac probleme din cauza servo-urilor, in regimul lejer de pe un mk sunt la fel de sigure ca un BEC extern.
Iar ESC-urile cat de cat serioase au propriul lor BEC pentru procesor, caderea BEC-ului de servo nu influenteaza controlul motorului, daca mai ai receptie
... cu picioarele pe pamant ...
#261
icsss
- MEGA Membru
-
- Grup: Members
- Postari: 2085
- Inregistrat: 16-May 10
- Gender:Male
- Location:Iasi
- Interests:Aeromodelism
Postat 06 November 2012 - 03:37 PM
renatoa, la 06 November 2012 - 03:20 PM, a spus:
Crezi ca un BEC extern e mai de incredere decat BEC-ul de pe un ESC?
Daca e in comutatie mai si radiaza...
BEC-urile pe ESC-urile de avioane fac probleme din cauza servo-urilor, in regimul lejer de pe un mk sunt la fel de sigure ca un BEC extern.
Iar ESC-urile cat de cat serioase au propriul lor BEC pentru procesor, caderea BEC-ului de servo nu influenteaza controlul motorului, daca mai ai receptie
Daca e in comutatie mai si radiaza...
BEC-urile pe ESC-urile de avioane fac probleme din cauza servo-urilor, in regimul lejer de pe un mk sunt la fel de sigure ca un BEC extern.
Iar ESC-urile cat de cat serioase au propriul lor BEC pentru procesor, caderea BEC-ului de servo nu influenteaza controlul motorului, daca mai ai receptie
BEC-ul de pe mystery mi-a facut probleme pe avion (Nu ducea decat 1-2 servouri clasice) si am vazut pe HK ca multi au avut probleme cu ele.
Acum il am pe asta
#262
icsss
- MEGA Membru
-
- Grup: Members
- Postari: 2085
- Inregistrat: 16-May 10
- Gender:Male
- Location:Iasi
- Interests:Aeromodelism
Postat 06 November 2012 - 05:51 PM
renatoa, la 06 November 2012 - 03:01 PM, a spus:
A doua pare cea mai indicata: scoti plusul de la servo-uri, lasi masa si semnalul, si conectezi cu + de la ESC, care acum e scos. In felul asta daca masa de la ESC-ul respectiv se deconecteaza nu vei avea bucle.
Dar daca iau plusul direct de la BECul extern? (acelasi BEC care alimenteaza FC-ul). E corect?
E posibil ca BEC-ul ESCurilor sa nu duca 2 servorui digitale + un analog pentru cam trigger. Am mai patit asa cu BEC-urile de pe Mystery..
#263
renatoa
- Sky Sapiens
-
- Grup: Members
- Postari: 19176
- Inregistrat: 28-April 05
- Gender:Male
Postat 06 November 2012 - 06:23 PM
Iti creezi singur premizele ca daca un servo se blocheaza, sa dai de pamant cu alimentarea FC... buna treaba... atunci la ce ai mai pus alimentare externa?
Putina documentare nu ar strica inainte de a va repezi la cumparat componente... vad da aceste ESC-uri Mistery nu par sa aiba stabilizator separat pentru procesor, nefericit caz.
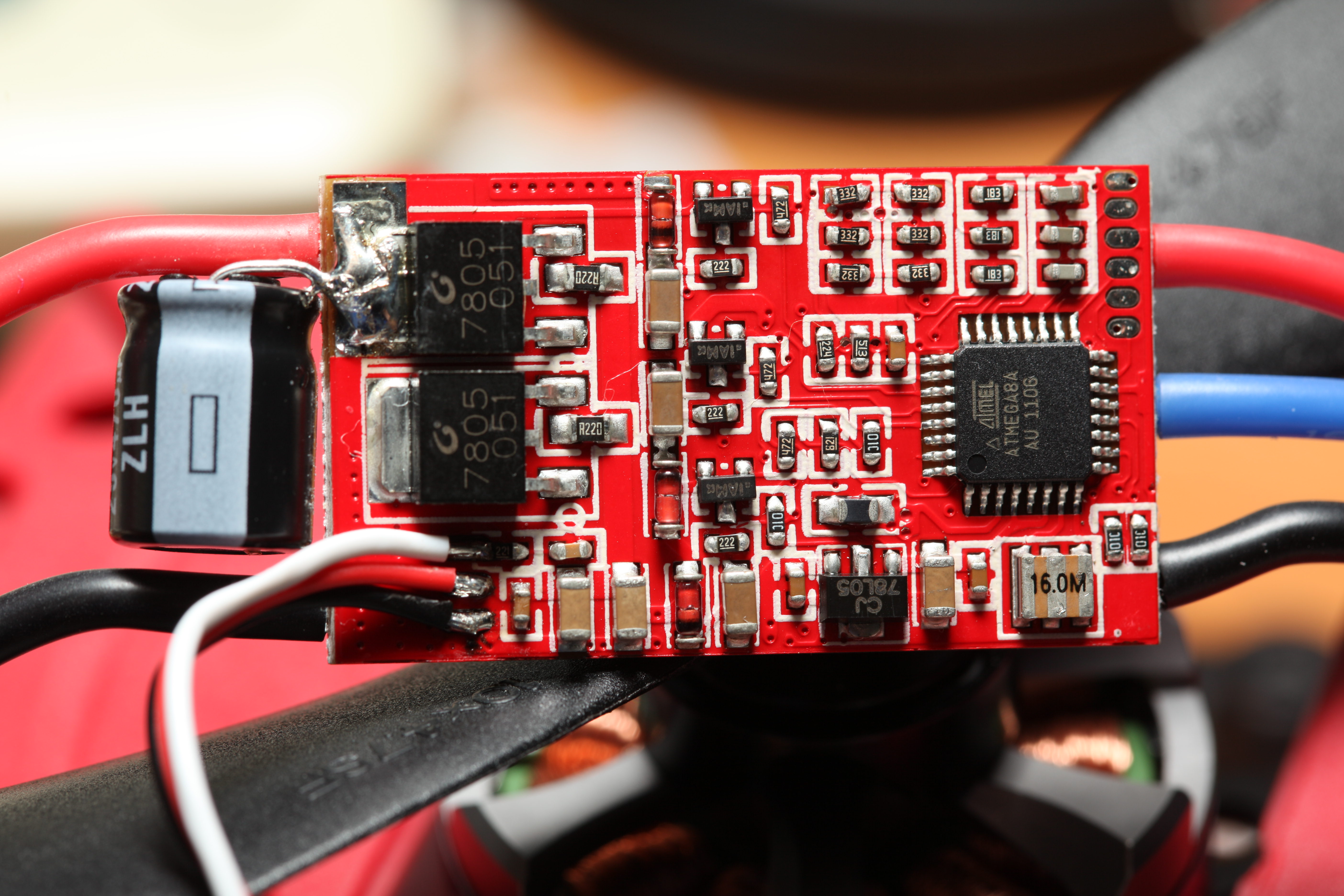
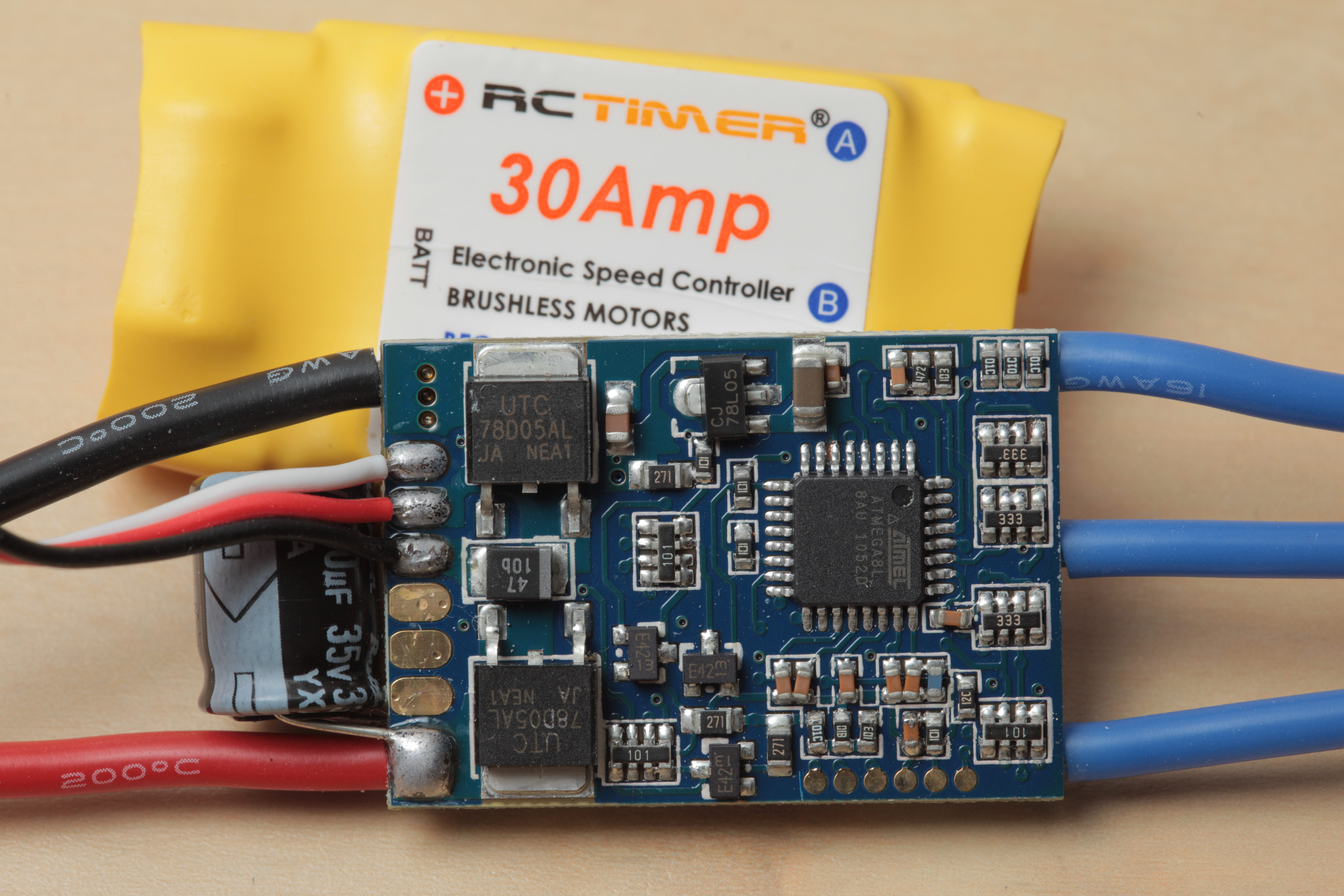
Link-uri la poze:
ESC Mistery: http://static.rcgrou...201-plogste.jpg
ESC F-30A : http://0x.ca/sim/esc...0A/img_2231.jpg
ESC RCTimer: http://0x.ca/sim/esc...02/img_4507.jpg
La ultimele doua se vede clar stabilizatorul 78L05 dedicat pentru procesor, care va tine bratul respectiv in functiune si daca un servo se blocheaza.
Cat despre acel UBEC, cu toata eticheta Low RF noise, am avut asa ceva si cand il apropiam de giro-uri (piezo), le adormeam. Or fi astea moderne MEMS mai imune... :pardon:
Ce poti face in situatia data ?
Eu as pune FC-ul pe unul din ESC-uri, incarcarea este minuscula, si riscul de a supraincarca BEC-ul ESC e nul. Si as folosi UBEC-ul extern pt servo gimbal.
Dar nu vad ce ar avea in neregula BEC-ul liniar din ESC-uri, este acelasi folosit in toate modelele, 7805.
Cred ca mai curand ai avut probleme cu servo-urile in acel avion.
Putina documentare nu ar strica inainte de a va repezi la cumparat componente... vad da aceste ESC-uri Mistery nu par sa aiba stabilizator separat pentru procesor, nefericit caz.
Link-uri la poze:
ESC Mistery: http://static.rcgrou...201-plogste.jpg
ESC F-30A : http://0x.ca/sim/esc...0A/img_2231.jpg
ESC RCTimer: http://0x.ca/sim/esc...02/img_4507.jpg
La ultimele doua se vede clar stabilizatorul 78L05 dedicat pentru procesor, care va tine bratul respectiv in functiune si daca un servo se blocheaza.
Cat despre acel UBEC, cu toata eticheta Low RF noise, am avut asa ceva si cand il apropiam de giro-uri (piezo), le adormeam. Or fi astea moderne MEMS mai imune... :pardon:
Ce poti face in situatia data ?
Eu as pune FC-ul pe unul din ESC-uri, incarcarea este minuscula, si riscul de a supraincarca BEC-ul ESC e nul. Si as folosi UBEC-ul extern pt servo gimbal.
Dar nu vad ce ar avea in neregula BEC-ul liniar din ESC-uri, este acelasi folosit in toate modelele, 7805.
Cred ca mai curand ai avut probleme cu servo-urile in acel avion.
Aceasta postare a fost editata de renatoa: 06 November 2012 - 06:26 PM
... cu picioarele pe pamant ...
#264
icsss
- MEGA Membru
-
- Grup: Members
- Postari: 2085
- Inregistrat: 16-May 10
- Gender:Male
- Location:Iasi
- Interests:Aeromodelism
Postat 06 November 2012 - 07:32 PM
renatoa, la 06 November 2012 - 06:23 PM, a spus:
Iti creezi singur premizele ca daca un servo se blocheaza, sa dai de pamant cu alimentarea FC... buna treaba... atunci la ce ai mai pus alimentare externa?
Putina documentare nu ar strica inainte de a va repezi la cumparat componente... vad da aceste ESC-uri Mistery nu par sa aiba stabilizator separat pentru procesor, nefericit caz.
Link-uri la poze:
ESC Mistery: http://static.rcgrou...201-plogste.jpg
ESC F-30A : http://0x.ca/sim/esc...0A/img_2231.jpg
ESC RCTimer: http://0x.ca/sim/esc...02/img_4507.jpg
La ultimele doua se vede clar stabilizatorul 78L05 dedicat pentru procesor, care va tine bratul respectiv in functiune si daca un servo se blocheaza.
Cat despre acel UBEC, cu toata eticheta Low RF noise, am avut asa ceva si cand il apropiam de giro-uri (piezo), le adormeam. Or fi astea moderne MEMS mai imune... :unsure:
Ce poti face in situatia data ?
Eu as pune FC-ul pe unul din ESC-uri, incarcarea este minuscula, si riscul de a supraincarca BEC-ul ESC e nul. Si as folosi UBEC-ul extern pt servo gimbal.
Dar nu vad ce ar avea in neregula BEC-ul liniar din ESC-uri, este acelasi folosit in toate modelele, 7805.
Cred ca mai curand ai avut probleme cu servo-urile in acel avion.
Putina documentare nu ar strica inainte de a va repezi la cumparat componente... vad da aceste ESC-uri Mistery nu par sa aiba stabilizator separat pentru procesor, nefericit caz.
Link-uri la poze:
ESC Mistery: http://static.rcgrou...201-plogste.jpg
ESC F-30A : http://0x.ca/sim/esc...0A/img_2231.jpg
ESC RCTimer: http://0x.ca/sim/esc...02/img_4507.jpg
La ultimele doua se vede clar stabilizatorul 78L05 dedicat pentru procesor, care va tine bratul respectiv in functiune si daca un servo se blocheaza.
Cat despre acel UBEC, cu toata eticheta Low RF noise, am avut asa ceva si cand il apropiam de giro-uri (piezo), le adormeam. Or fi astea moderne MEMS mai imune... :unsure:
Ce poti face in situatia data ?
Eu as pune FC-ul pe unul din ESC-uri, incarcarea este minuscula, si riscul de a supraincarca BEC-ul ESC e nul. Si as folosi UBEC-ul extern pt servo gimbal.
Dar nu vad ce ar avea in neregula BEC-ul liniar din ESC-uri, este acelasi folosit in toate modelele, 7805.
Cred ca mai curand ai avut probleme cu servo-urile in acel avion.
M-am uitat acum pe ESc si am gasit o piesa etichetata 78L05. Poza pusa de tine e de la alt ESC.
In fine, o sa merg pe varianta propusa de tine cu BEC extern pentru gimbal si BEC din ESC pentru FC+GPS+BT+RX+minimOSD
Unde o fi jumperul ala... :D
In ordinea asta de idei.. iau doar semnal de la FC si +/- de la BEC-ul extern.. pentru servouri? FC-ul fiind alimentat de la BEC-ul ESC-ului
Aceasta postare a fost editata de icsss: 06 November 2012 - 07:35 PM
#266
icsss
- MEGA Membru
-
- Grup: Members
- Postari: 2085
- Inregistrat: 16-May 10
- Gender:Male
- Location:Iasi
- Interests:Aeromodelism
Postat 06 November 2012 - 09:12 PM
renatoa, la 06 November 2012 - 08:09 PM, a spus:
Masa trebuie comuna, nu ai ce face... altfel cum circula semnalul de la FC spre servo, si inapoi...
Pentru a testa am alimentat tot prin BEC-ul de la ESC si pare ca merge, cel putin se misca dar s-a incalzit tare esc-ul.
Deci, jumperul de pe AIO taie si [+] de la gimblal.
------------
O alta situatie ipotetica:
RC-alimentat din BEC extern, toate firele rosii de la ESC-uri scoase, dar jumperul PUS
1. Gimbal-ul ar trebuie sa merga?
2. Iese fum din FC? :unsure:
Aceasta postare a fost editata de icsss: 06 November 2012 - 09:12 PM
#267
icsss
- MEGA Membru
-
- Grup: Members
- Postari: 2085
- Inregistrat: 16-May 10
- Gender:Male
- Location:Iasi
- Interests:Aeromodelism
Postat 07 November 2012 - 02:13 AM
Am reusit sa le alimentez din escu-ul extern si servo de pe Pitch parea ca isi face treaba.
Dar dupa ce am umbalt pe la parametri, nu se mai misca deloc; servourile au curent.
Nu gasesc mai nimic pe net despre setarile gimbal in mpng 2.7
Pe langa setarea parametrilor, cum se conecteaza RX-ul la FC?
Dar dupa ce am umbalt pe la parametri, nu se mai misca deloc; servourile au curent.
Nu gasesc mai nimic pe net despre setarile gimbal in mpng 2.7
Pe langa setarea parametrilor, cum se conecteaza RX-ul la FC?
Aceasta postare a fost editata de icsss: 07 November 2012 - 02:13 AM
#269
icsss
- MEGA Membru
-
- Grup: Members
- Postari: 2085
- Inregistrat: 16-May 10
- Gender:Male
- Location:Iasi
- Interests:Aeromodelism
Postat 07 November 2012 - 10:10 AM
renatoa, la 07 November 2012 - 08:33 AM, a spus:
Buna intrebare, tie iti ajung canalele 6.7.8 la FC ?! :drinks:
N-am ce face.. trebuie sa ma descurc cu ce am :drinks:
#270
renatoa
- Sky Sapiens
-
- Grup: Members
- Postari: 19176
- Inregistrat: 28-April 05
- Gender:Male
Postat 07 November 2012 - 10:24 AM
Intrebarea ramane... ai toate 8 canalele conectate ?
Vezi usor asta... in mission planner
Vezi usor asta... in mission planner
Aceasta postare a fost editata de renatoa: 07 November 2012 - 10:25 AM
... cu picioarele pe pamant ...
Arata acest topic










{kind=link}
{kind=link}
{kind=link}
71 useri citesc topicul
0 membri, 71 vizitatori, 0 utilizatori anonimi
