 Ajutor
Ajutor



Salut
Incerc prin acest topic sa venim in ajutorul incepatorilor.
Multi vin aici pe forum si fiind la inceput si nestiind unde sa caute, sunt dezorientati de atatia termeni care se folosecs la noi si nu-i inteleg. ( o spun din proprie experienta- ma incurcam in atatia termeni si inca nu-i stiu pe toti :blush: )
Pentru asta am deschis acest topic si as vrea ca seniorii (si nu numai) sa ma sprijine in acest demers
Nu vreau sa fie un tutorial ci cum scrie si in descriere sa fie un mic dictionar tehnic
O sa incep eu
ARF – (Almost Ready to Fly) - kit gata
Asamblat
TRAINER – avion de antrenament
RTF (Ready to Fly) adica aeromodel gata de zbor 100%
Motoare
Sunt doua tipuri de motoare electrice : cu perii (brushed) si
fara perii(brushless).
ESC (Electronic Speed Controller) – Regulator de turatie
Propeller – elice
Propeller saver –dispozitiv atasabil pt. elice (Propsaver)
RC –radio comanda (sau incorect se mai utilizeaza termenul telecomanda)
Astept seniorii :good:
- Nu puteti crea un topic nou
 Raspuns nou
Raspuns nou
Mic dictionar "tehnic" Pentru incepatori
 Citare Multipla
Citare Multipla
#2
 airdream
airdream 

- Membru
-

- Grup: Members
- Postari: 147
- Inregistrat: 30-September 09
- Gender:Male
- Location:Buzau
- Interests:Aeromodele
Postat 03 July 2014 - 10:27 AM
Termeni noi apar contnuu. Pana nu de mult nu stiam la ce se refera "full house" (este vorba despre planoarele care sunt echipate cu tot setul de comenzi de zbor: flapsuri, eleroane, directie, profundor); nici acum nu stiu daca intra in discutie si spoilerele (franele aerodinamice).
Topicul este foarte bun si cine nu stie poate sa intrebe.
Topicul este foarte bun si cine nu stie poate sa intrebe.
#3
Ciprian97

- MEGA Membru
-
- Grup: Members
- Postari: 3951
- Inregistrat: 19-August 12
- Gender:Male
- Location:Third Rock From The Sun
Postat 03 July 2014 - 10:45 AM
Planor full house se refera mai precis la aripa(suprafetele de control de pe ea),adica eleroane,flapsuri si frane aerodinamice(mai rar).In rest,toate modelele au profundor si directie,daca nu si motor.
#5
SID

- Search Prettys Womans in your town for night
-
- Grup: Members
- Postari: 1450
- Inregistrat: 26-December 09
- Gender:Male
- Location:Usa
- Interests:discussion
Postat 03 July 2014 - 11:09 AM
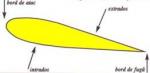
ARIPA
Partea din fata a aripii = bord de atac (parte rotunjita)
partea din spate = bord de fuga (sau de scurgere si este partea ascutita)
partea de sus (superioara) = extrados
partea de jos (inferioara) = intrados
Partea din fata a aripii = bord de atac (parte rotunjita)
partea din spate = bord de fuga (sau de scurgere si este partea ascutita)
partea de sus (superioara) = extrados
partea de jos (inferioara) = intrados
#6
SID
- Search Prettys Womans in your town for night
-
- Grup: Members
- Postari: 1450
- Inregistrat: 26-December 09
- Gender:Male
- Location:Usa
- Interests:discussion
Postat 03 July 2014 - 11:15 AM
flapsuri, eleroane, fuselaj, directie
Thumbnail atasat



Aceasta postare a fost editata de danysoft32: 03 July 2014 - 11:16 AM


#8
SID
- Search Prettys Womans in your town for night
-
- Grup: Members
- Postari: 1450
- Inregistrat: 26-December 09
- Gender:Male
- Location:Usa
- Interests:discussion
Postat 03 July 2014 - 11:21 AM
 danysoft32, la 03 July 2014 - 11:09 AM, a spus:
danysoft32, la 03 July 2014 - 11:09 AM, a spus:
ARIPA
Partea din fata a aripii = bord de atac (parte rotunjita)
partea din spate = bord de fuga (sau de scurgere si este partea ascutita)
partea de sus (superioara) = extrados
partea de jos (inferioara) = intrados
Partea din fata a aripii = bord de atac (parte rotunjita)
partea din spate = bord de fuga (sau de scurgere si este partea ascutita)
partea de sus (superioara) = extrados
partea de jos (inferioara) = intrados
Thumbnail atasat
#9
RedDevil

- Pfiu Drace, zboara!!!
-
- Grup: Banned
- Postari: 2111
- Inregistrat: 16-March 13
- Gender:Male
- Location:Targoviste
- Interests:Aero, 3D
Postat 03 July 2014 - 01:02 PM
danysoft32, la 03 July 2014 - 08:33 AM, a spus:
Propeller saver –dispozitiv atasabil pt. elice (Propsaver)
Propsaverul este un dispozitiv de prindere a eliciei de motor si care la aterizari mai dure permite eliciei sa sara, an acest fel nu se rupe si o salveaza, ideam pentru incepatori si nu numai.
Fly it, like you stole it!
#10
SID
- Search Prettys Womans in your town for night
-
- Grup: Members
- Postari: 1450
- Inregistrat: 26-December 09
- Gender:Male
- Location:Usa
- Interests:discussion
Postat 03 July 2014 - 01:37 PM
RedDevil, la 03 July 2014 - 01:02 PM, a spus:
Propsaverul este un dispozitiv de prindere a eliciei de motor si care la aterizari mai dure permite eliciei sa sara, an acest fel nu se rupe si o salveaza, ideam pentru incepatori si nu numai.
Asa este si mai are o utilitate, atunci cand axul motorului este excentric sau "bate", acest propsaver preia din bataile axului astfel elicea lucreaza cat mai normal
#11
dan_mitea

- nick anterior:Se poate si asa
-
- Grup: Members
- Postari: 9330
- Inregistrat: 26-October 03
- Gender:Male
- Location:Laval, Canada
Postat 03 July 2014 - 06:30 PM
Dar este si reversul: Elicea nu va merge perfect ''rotund'' niciodata. Daca fixezi elicea rigid, totul bine echilibrat si elicea are varfurile in acelasi cerc...adica nu ''bate''. vei fi surprins cat de mult schimba lucrurile. Parca ai avea un alt model.
Multa, multa bafta.
Multa, multa bafta.
#12
SID
- Search Prettys Womans in your town for night
-
- Grup: Members
- Postari: 1450
- Inregistrat: 26-December 09
- Gender:Male
- Location:Usa
- Interests:discussion
Postat 06 July 2014 - 09:00 PM
BECHIE - Dispozitiv auxiliar de sprijin la avion /aeromodel/planor, format dintr-un suport cu patină sau dispozitiv pe care se monteaza roata din spate
#14
Ciprian97
- MEGA Membru
-
- Grup: Members
- Postari: 3951
- Inregistrat: 19-August 12
- Gender:Male
- Location:Third Rock From The Sun
Postat 10 July 2014 - 04:20 PM
Expo=functia exponentiala,modifica raspunsul servoului in functie de pozitia mansei.Adica,la jumate de cursa de mansa poate sa ii corespunda 25% din cursa servoului si nu 50% cum ar fi normal.Se foloseste pentru a calma un model sensibil la curse lungi de comanda in special la primele zboruri cand nu esti familiarizat cu modelul.Dupaia setezi un nivel la care esti comfortabil.
Dual-rates=o functie care limiteaza cursa maxima a servoului insa doar daca acea valoare este sub valoarea setata de EPA(end point adjustment,adica ajustarea punctului de maxim).Cel mai bine dau exemplu urmator:avem un servo cuplat la profundor.In aer zburam repede si n-avem nevoie de curse lungi deci setam low-rates(curse mici) pana la un nivel care ne place in zbor.Insa la aterizare parca ne-ar prinde bine sa mai avem de unde trage de profundor asa ca setam un high-rate care sa permita sa tragi de profundor mai tare decat ai putea in low-rates.In zbor n-ai vrea atata cursa ca-i prea mult si n-ai finete in comenzi.
EPA are autoritate peste orice alt mix/setare si o sa explic de ce.Sa zicem ca avem un servo super fortos care ar putea sa traga profundorul ala prea tare si sa-l rupa.Nu vrem asta deci setam un EPA care sa opreasca servoul sa se duca peste un anume nivel si nivelul ala e sfant.Nu il schimba niciun mix sau orice alta setare a statiei.Chiar daca ii dai un high rate de 125% daca EPA e setat la 70% atunci nu trece in veci de 70% ca-mi rupe profundorul in 2.
Dual-rates=o functie care limiteaza cursa maxima a servoului insa doar daca acea valoare este sub valoarea setata de EPA(end point adjustment,adica ajustarea punctului de maxim).Cel mai bine dau exemplu urmator:avem un servo cuplat la profundor.In aer zburam repede si n-avem nevoie de curse lungi deci setam low-rates(curse mici) pana la un nivel care ne place in zbor.Insa la aterizare parca ne-ar prinde bine sa mai avem de unde trage de profundor asa ca setam un high-rate care sa permita sa tragi de profundor mai tare decat ai putea in low-rates.In zbor n-ai vrea atata cursa ca-i prea mult si n-ai finete in comenzi.
EPA are autoritate peste orice alt mix/setare si o sa explic de ce.Sa zicem ca avem un servo super fortos care ar putea sa traga profundorul ala prea tare si sa-l rupa.Nu vrem asta deci setam un EPA care sa opreasca servoul sa se duca peste un anume nivel si nivelul ala e sfant.Nu il schimba niciun mix sau orice alta setare a statiei.Chiar daca ii dai un high rate de 125% daca EPA e setat la 70% atunci nu trece in veci de 70% ca-mi rupe profundorul in 2.
#15
renatoa
- Sky Sapiens
-
- Grup: Members
- Postari: 19176
- Inregistrat: 28-April 05
- Gender:Male
Postat 10 July 2014 - 04:34 PM
Ce ai descris ca EPA este cunoscut ca servo limit in unele statii.
In statiile care au servo limit, EPA este un multiplicator, nu un limitator.
Adica mai apropiat de dual rate, dar fara switch sa il modifici.
In statiile care au servo limit, EPA este un multiplicator, nu un limitator.
Adica mai apropiat de dual rate, dar fara switch sa il modifici.
... cu picioarele pe pamant ...
#16
Adi-GVA

- Membru de onoare
-
- Grup: Members
- Postari: 739
- Inregistrat: 02-December 02
- Gender:Male
- Location:Unde zboara avioanele
Postat 10 July 2014 - 06:49 PM
Ciprian97, la 10 July 2014 - 04:20 PM, a spus:
Dual-rates=o functie care limiteaza cursa maxima a servoului insa doar daca acea valoare este sub valoarea setata de EPA(end point adjustment,adica ajustarea punctului de maxim).Cel mai bine dau exemplu urmator:avem un servo cuplat la profundor.In aer zburam repede si n-avem nevoie de curse lungi deci setam low-rates(curse mici) pana la un nivel care ne place in zbor.Insa la aterizare parca ne-ar prinde bine sa mai avem de unde trage de profundor asa ca setam un high-rate care sa permita sa tragi de profundor mai tare decat ai putea in low-rates.In zbor n-ai vrea atata cursa ca-i prea mult si n-ai finete in comenzi.
EPA are autoritate peste orice alt mix/setare si o sa explic de ce.Sa zicem ca avem un servo super fortos care ar putea sa traga profundorul ala prea tare si sa-l rupa.Nu vrem asta deci setam un EPA care sa opreasca servoul sa se duca peste un anume nivel si nivelul ala e sfant.Nu il schimba niciun mix sau orice alta setare a statiei.Chiar daca ii dai un high rate de 125% daca EPA e setat la 70% atunci nu trece in veci de 70% ca-mi rupe profundorul in 2.
EPA are autoritate peste orice alt mix/setare si o sa explic de ce.Sa zicem ca avem un servo super fortos care ar putea sa traga profundorul ala prea tare si sa-l rupa.Nu vrem asta deci setam un EPA care sa opreasca servoul sa se duca peste un anume nivel si nivelul ala e sfant.Nu il schimba niciun mix sau orice alta setare a statiei.Chiar daca ii dai un high rate de 125% daca EPA e setat la 70% atunci nu trece in veci de 70% ca-mi rupe profundorul in 2.
Vreau sa clarific ceva:
Ce zici tu aici, tehnic e corect; asa se intampla.
Referitor la dual rate, NU se foloseste asa cum ai prezentat tu, ci invers: La decolari si aterizari se foloseste low rate, iar high rate, in anumite faze de zbor specifice in general acrobatelor 3D atunci cand se zboara in regimurile de stall (hover, harier, torque roll, rolling harrier, etc). In acest tip de zbor este nevoie de curse mari ale comenzilor pentru ca peste ele nu trece decat curentul de aer generat de elice.
O alta posibilitate a setarii functiei de dual rate (termenul trebuie inteles ca doua faze de zbor) poate fi si prin setarea egala a curselor comenzilor dar cu expo diferit (ex: faza 1 expo 55%, faza 2 expo 25%, EPA avand aceiasi valoare in ambele cazuri). In practica asta se traduce prin faptul ca in faza a doua de zbor modelul va fi mai sensibil pe comenzi (mai rapid).
Fly Extreme! __EXTREME FLIGHT
#18
Ciprian97
- MEGA Membru
-
- Grup: Members
- Postari: 3951
- Inregistrat: 19-August 12
- Gender:Male
- Location:Third Rock From The Sun
Postat 10 July 2014 - 07:27 PM
Vorbim deja de statii avansate,care sa permita expo in functie de rate-ul ales.Cele mai simple statii computerizate au un expo unic,valabil tot timpul.
Si referitor la high/low rates,eu asa zbor mereu cu high rates la aterizare/decolare cand viteza este mica si e nevoie de o cursa mai mare pt acelasi efect.Depinde acuma si ce zbori.Corect ce zici si tuhttp://www.rhcforum.ro/public/style_emoticons/default/good.gif.
Si referitor la high/low rates,eu asa zbor mereu cu high rates la aterizare/decolare cand viteza este mica si e nevoie de o cursa mai mare pt acelasi efect.Depinde acuma si ce zbori.Corect ce zici si tuhttp://www.rhcforum.ro/public/style_emoticons/default/good.gif.
#19
SID
- Search Prettys Womans in your town for night
-
- Grup: Members
- Postari: 1450
- Inregistrat: 26-December 09
- Gender:Male
- Location:Usa
- Interests:discussion
Postat 15 July 2014 - 01:16 PM
Unghi de incidenta la aripa = unghiul dintre planul aripii (intrados) si planul orizontal... (asa este ? )
Daca nu-i bine corectati-ma
Daca nu-i bine corectati-ma
#20
renatoa
- Sky Sapiens
-
- Grup: Members
- Postari: 19176
- Inregistrat: 28-April 05
- Gender:Male
Postat 15 July 2014 - 01:42 PM
Si planul orizontal cum il definesti? ca unele avioane zboara cu varful in jos, altele si-l mai iau la purtare, sunt mai obraznice...
Pentru orice nelamurire, eu arunc intai o privire la wiki, e mai scurt si mai la obiect decat google, plus ca are trimiteri la articole care dezvolta subiectul:
http://en.wikipedia....d-wing_aircraft
Si nici intradosul nu inseamna neaparat planul aripii...
http://en.wikipedia....Chord_(aircraft)
Pentru orice nelamurire, eu arunc intai o privire la wiki, e mai scurt si mai la obiect decat google, plus ca are trimiteri la articole care dezvolta subiectul:
http://en.wikipedia....d-wing_aircraft
Si nici intradosul nu inseamna neaparat planul aripii...
http://en.wikipedia....Chord_(aircraft)
Aceasta postare a fost editata de renatoa: 15 July 2014 - 01:45 PM
... cu picioarele pe pamant ...
#21
SID
- Search Prettys Womans in your town for night
-
- Grup: Members
- Postari: 1450
- Inregistrat: 26-December 09
- Gender:Male
- Location:Usa
- Interests:discussion
Postat 15 July 2014 - 02:04 PM
renatoa, la 15 July 2014 - 01:42 PM, a spus:
Si planul orizontal cum il definesti? ca unele avioane zboara cu varful in jos, altele si-l mai iau la purtare, sunt mai obraznice...
Pentru orice nelamurire, eu arunc intai o privire la wiki, e mai scurt si mai la obiect decat google, plus ca are trimiteri la articole care dezvolta subiectul:
http://en.wikipedia....d-wing_aircraft
Si nici intradosul nu inseamna neaparat planul aripii...
http://en.wikipedia....Chord_(aircraft)
Pentru orice nelamurire, eu arunc intai o privire la wiki, e mai scurt si mai la obiect decat google, plus ca are trimiteri la articole care dezvolta subiectul:
http://en.wikipedia....d-wing_aircraft
Si nici intradosul nu inseamna neaparat planul aripii...
http://en.wikipedia....Chord_(aircraft)
Merci de raspuns (poate nu m-am exprimat cum ar fi trebuit, dar in esenta cred ca am zis corect sau cel putin asa am gandit)
Bafta
Aceasta postare a fost editata de danysoft32: 15 July 2014 - 02:05 PM
#23
SID
- Search Prettys Womans in your town for night
-
- Grup: Members
- Postari: 1450
- Inregistrat: 26-December 09
- Gender:Male
- Location:Usa
- Interests:discussion
Postat 17 August 2014 - 08:09 AM
tot descopar pe forum expresii noi cu care nu sunt inca familiarizat
High alpha - zbor la un unghi de atac mare
P.S
Daca nu-i asa astept corecturi din partea cunoscatorilor
High alpha - zbor la un unghi de atac mare
P.S
Daca nu-i asa astept corecturi din partea cunoscatorilor
#24
RedDevil
- Pfiu Drace, zboara!!!
-
- Grup: Banned
- Postari: 2111
- Inregistrat: 16-March 13
- Gender:Male
- Location:Targoviste
- Interests:Aero, 3D
Postat 17 August 2014 - 09:05 PM
danysoft32, la 14 August 2014 - 08:22 AM, a spus:
Hover este manevra de a sta la punct fix, de regula manevra asta o poate face un heli sau un multirotor dar si avioanele destinate acrobatiilor de tip 3D, si anume se mentine suspendat in elicie la o turatie constanta a motorului undeva intr-un punct care nici sa nu avanseze avionul dar nici sa cada si isi pastreaa pozitia prin mici ajustari din celalte comenzi.
Fly it, like you stole it!
#25
Ciprian97
- MEGA Membru
-
- Grup: Members
- Postari: 3951
- Inregistrat: 19-August 12
- Gender:Male
- Location:Third Rock From The Sun
Postat 17 August 2014 - 10:11 PM
Corect,high alpha inseamna unghi de atac al aripii mare(high AoA).Adesea high alpha maxim este 18° pentru majoritatea profilelor,dupa aceasta valoare aripa tinde sa se angajeze.Exista si avioane care pot zbura si peste valoarea asta insa nu aripa le tine in aer ci mai de graba motorul.

#28
SID
- Search Prettys Womans in your town for night
-
- Grup: Members
- Postari: 1450
- Inregistrat: 26-December 09
- Gender:Male
- Location:Usa
- Interests:discussion
Postat 02 September 2014 - 07:38 AM
Parfenov, la 01 September 2014 - 11:01 PM, a spus:
Fm-PPM ? ( nu am putut sa dau edit )
Citez din
ERASER (postare din 2007)
" Este vorba de doua standarde de codare a semnalului RC.Asa, in trei cuvinte PPM = pulse position modulation. Practic semnalul generat de radiocomanda, inainte de etajul HF, este sub forma unui tren de pulsuri cu durate diferite, fiecarui canal corespunzandu-i un astfel de puls. Semnalul este apoi transmis ca unde radio in modulatie FM sau AM. Avantaje: receptor mic, ieftin, transmisie rapida, la iesirea din raza de actiune pierderea controlului nu se manifesta brusc.. Dezavantaje: usor de bruiat.
PCM = pulse code modulation. Semnalul generat de radiocomanda la inceput este tot PPM, apoi este digitizat cu un convertor A/D si este transmis ca unde radio in modulatie FM. Receptorul decodeaza informatia care contine pozitiile servourilor si biti de control etc. .
Avantaje: servomecanismele se pozitioneaza , rezista mai bine la bruiaje iar cand nu mai poate decoda semnalul intra in mod fail-safe.
Dezavantaje: receptor scump, de obicei ceva mai mare, la iesirea din raza pierzi controlul brusc fara nici o avertizare, este ceva mai lent cu unele sisteme chiar foarte lente (Simprop SAM si Multiplex cu 20frames/second). Standardul PPM este universal.
Standardul PCM este propriu fiecarui producator, fiecare cu algoritmul lui.
Citeste aici Articol in engleza "
Arata acest topic










- Nu puteti crea un topic nou
- Raspuns nou
1 useri citesc topicul
0 membri, 1 vizitatori, 0 utilizatori anonimi
