 Ajutor
Ajutor







 renatoa, la 31 January 2014 - 06:11 PM, a spus:
renatoa, la 31 January 2014 - 06:11 PM, a spus:
La o astfel de intrebare raspunzi taind pe rand fiecare fir de masa si analizand ce se intampla, daca circuitul de masa se inchide prin alta cale, si daca se suprasolicita ceva pe noua cale.
Nu cred la servo-uri sa fie astfel de probleme, bucla de masa clasica care a cauzat probleme in RC dea lungul timpului a fost cand aveai senzor de curent.
Daca dintr-un motiv oarecare se intrerupea contactul de masa dintre senzorul de curent si ESC, atunci masa de la pack se inchidea prin masa senzor, apoi FC, receptor si in final ajungea la ESC, curenti de zeci de amperi traversand numai trasee proiectate pentru semnal mic, care dupa un timp se lasa cu ceva ars. Rezolvarea in acest caz este sa nu mai tragi fir de masa de la senzor de curent la componenta care citea valoarea amperajului, FC/hub/receptor, oricare din ele avand deja masa comuna mergand pana la ESC.
Nu cred la servo-uri sa fie astfel de probleme, bucla de masa clasica care a cauzat probleme in RC dea lungul timpului a fost cand aveai senzor de curent.
Daca dintr-un motiv oarecare se intrerupea contactul de masa dintre senzorul de curent si ESC, atunci masa de la pack se inchidea prin masa senzor, apoi FC, receptor si in final ajungea la ESC, curenti de zeci de amperi traversand numai trasee proiectate pentru semnal mic, care dupa un timp se lasa cu ceva ars. Rezolvarea in acest caz este sa nu mai tragi fir de masa de la senzor de curent la componenta care citea valoarea amperajului, FC/hub/receptor, oricare din ele avand deja masa comuna mergand pana la ESC.
Senzor de curent am... si nu am tras gnd din el in FC. Are doar un fir pt curent si unul pt volti.
Stiu ca la copter.. pe vremea cand aveam gimbal cu serovuri.. am pus servourile pe UBEC separat.. si am tras semnal si GND in FC(pitch/roll) si in RX(trigger). Nu am avut probleme.
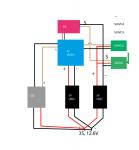
As merge si acum tot la fel.. adica masa si pozitiv din ubec pt toate servourile iar din servorui in FC/RX sa plece doar semanl si masa (linia punctata din schema).
Nu stiu cum as putea identifica daca "suprasolicita ceva pe noua cale"..
Adica asa :)
Thumbnail atasat
Aceasta postare a fost editata de icsss: 31 January 2014 - 06:31 PM
 Citare Multipla
Citare Multipla















